DCT的基本原理相当于带有两个离合器的两个变速器,其中一个变速器是奇数挡,一个偶数挡。车辆行驶中,一个变速器处于工作状态时另一变速器空转,换挡时提前挂挡,通过两个离合器的切换来实现两个变速器交替进入工作状态。
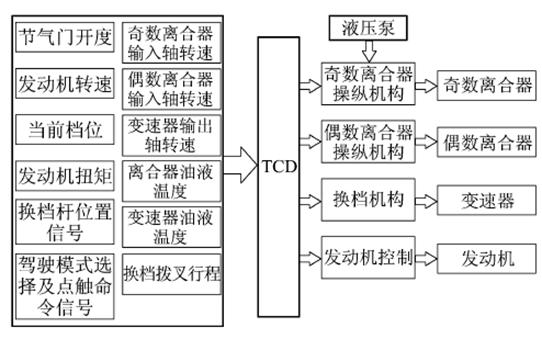
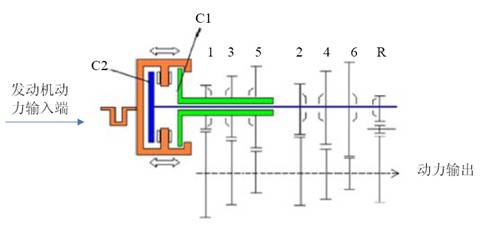
双离合器以两个离合器的重叠工作保证了DCT的不切断动力换挡。根据齿轮轴布置方式的不同,DCT结构有两轴和三轴等多种型式,都是由安装在一起的两个离合器和常啮合定轴式变速器组成。如图所示为两轴式DCT的工作原理图。
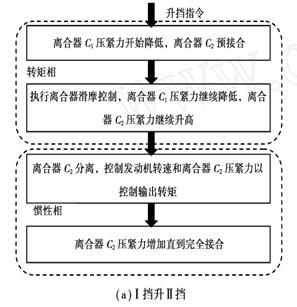
该DCT的主要组成部分有C1、C2两个离合器,输入轴与输出轴。两轴式DCT的具体结构特点是:其1、3、5挡与离合器C1联结在一起,2、4、6挡与离合器C2联结,即将奇数挡与偶数挡分别与离合器C1、C2离合器分开配置,离合器C2输出轴为一个实心轴,而离合器C1的输出轴却是套在C2输出轴外面的一个空心轴,两个输出轴是同心的。变速器换挡所用的同步器等与原来的普通手动变速器完全相同。在车辆处于停车状态时,离合器C1、C2都处于分离状态。起步前,先将挡位切换为1挡,然后离合器C1接合,车辆开始起步运行,离合器C2仍处于分离状态,不传递动力。当车辆加速,接近2挡的换挡点时,由TCU控制自动换挡机构将挡位提前换入2挡,离合器C1开始分离,同时离合器C2开始接合,两个离合器交替切换,直到离合器C1完全分离,离合器C2完全接合,整个换挡过程结束。
车辆进入2挡运行后,车辆自动变速器电控单元可以根据相关传感器信号知道车辆当前运行状态,进而判断车辆即将进入运行的挡位,如果车辆加速,则下一个挡位为3挡,如果车辆减速,则下一个挡位为1挡。而1挡和3挡均联接在离合器C1上,因为该离合器处于分离状态,不传递动力,故可以指令自动换挡机构十分方便地预先换入即将进入工作的挡位,当车辆运行达到换挡点时,只需要将正在工作的离合器C2分离,同时将另一个离合器C1接合,配合好两个离合器的切换时序,整个换挡动作全部完成。车辆继续运行时,其他挡位的切换过程也都类似。
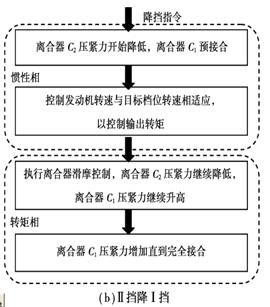
当车辆在行使中需要1挡换3挡或者2挡换4挡时(即需要同轴换挡时),只需要经过中间过渡挡。以2挡换4挡为例,当前离合器C2结合,离合器C1分离,当TCU接收到换挡指令时,首先挂入3挡,然后离合器C1开始结合,离合器C2开始分离,当离合器C2完全分离,迅速挂入4挡,然后离合器C1开始分离,离合器C2开始结合,直至离合器C2完全结合,离合器C1完全分离。换挡结束。
在车辆的换挡过程中,双离合器系统的换挡过渡过程实质上就是两个离合器的交替分离结合的过渡过程,在换挡过程中发动机输入动力不中断,这样实现了动力换挡,极大地提高了车辆乘坐舒适性,同时相对于AT等也提高了车辆的燃油经济性。
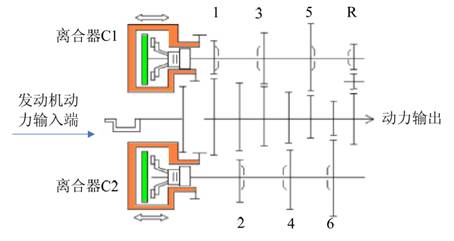
在对变速器的轴向尺寸要求较高的情况下,例如前置前驱动乘用车的变速器布置为横置工作时;或者中、重型商用车传递扭矩大,为提高其强度与刚度时,DCT也可以设计相应的结构以适应整车布置的需要。如采用双中间轴式结构,如下图所示。它采用了两个中间轴,可以大大缩短变速器的轴向尺寸,而换挡过程和功能与其它布置形式一样。
双离合器以两个离合器的重叠工作保证了DCT的不切断动力换挡。根据齿轮轴布置方式的不同,DCT结构有两轴和三轴等多种型式,都是由安装在一起的两个离合器和常啮合定轴式变速器组成。如图所示为两轴式DCT的工作原理图。
 |
车辆进入2挡运行后,车辆自动变速器电控单元可以根据相关传感器信号知道车辆当前运行状态,进而判断车辆即将进入运行的挡位,如果车辆加速,则下一个挡位为3挡,如果车辆减速,则下一个挡位为1挡。而1挡和3挡均联接在离合器C1上,因为该离合器处于分离状态,不传递动力,故可以指令自动换挡机构十分方便地预先换入即将进入工作的挡位,当车辆运行达到换挡点时,只需要将正在工作的离合器C2分离,同时将另一个离合器C1接合,配合好两个离合器的切换时序,整个换挡动作全部完成。车辆继续运行时,其他挡位的切换过程也都类似。
当车辆在行使中需要1挡换3挡或者2挡换4挡时(即需要同轴换挡时),只需要经过中间过渡挡。以2挡换4挡为例,当前离合器C2结合,离合器C1分离,当TCU接收到换挡指令时,首先挂入3挡,然后离合器C1开始结合,离合器C2开始分离,当离合器C2完全分离,迅速挂入4挡,然后离合器C1开始分离,离合器C2开始结合,直至离合器C2完全结合,离合器C1完全分离。换挡结束。
在车辆的换挡过程中,双离合器系统的换挡过渡过程实质上就是两个离合器的交替分离结合的过渡过程,在换挡过程中发动机输入动力不中断,这样实现了动力换挡,极大地提高了车辆乘坐舒适性,同时相对于AT等也提高了车辆的燃油经济性。
在对变速器的轴向尺寸要求较高的情况下,例如前置前驱动乘用车的变速器布置为横置工作时;或者中、重型商用车传递扭矩大,为提高其强度与刚度时,DCT也可以设计相应的结构以适应整车布置的需要。如采用双中间轴式结构,如下图所示。它采用了两个中间轴,可以大大缩短变速器的轴向尺寸,而换挡过程和功能与其它布置形式一样。
 |